So, we have some Logitech C920 cameras. They are really good for their price and sport a couple of microphones with echo cancellation and an omnidirectional pattern. Which is quite great for its intended use but a major pain if what you want to perform voice activity detection. Basically, all the cameras trigger when someone speaks. It can be worked around but things are a lot easier when the sound from one camera doesn’t leak that much into the others.
Not wanting to replace or modify the internal microphone array if there was another way I decided to test if with some absorbent foam the response could be shaped to something more useful.
Utilísima un poroto.
I cut a couple of rectangular prisms with cavities that more or less match the shape of the cameras. My supply of plushy fabric was rather limited and so I planned a bit more carefully how to divide it and make the crevices. After that I just cut it in four equal pieces and held everything with hot melt glue and some stitches.



Results.
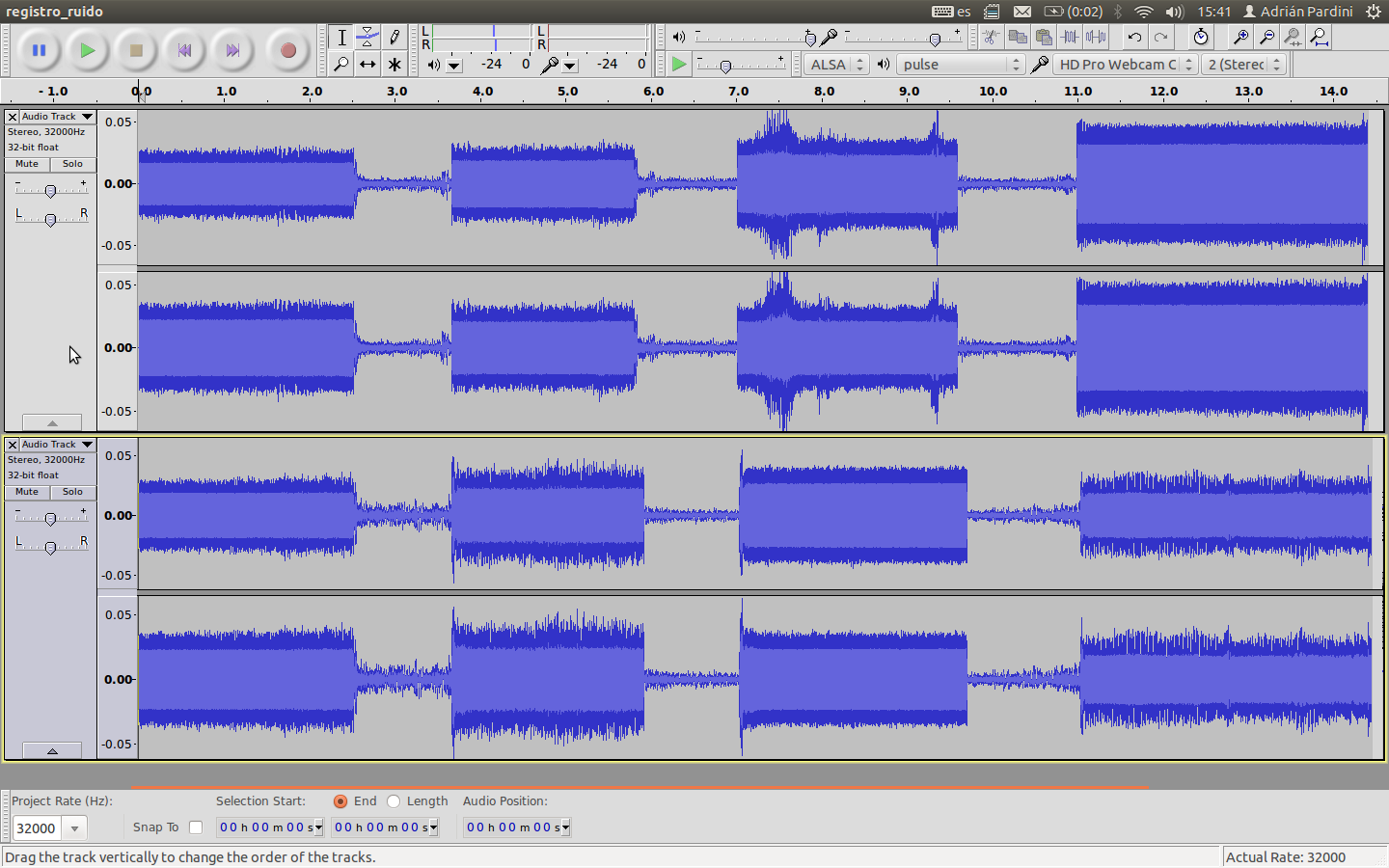
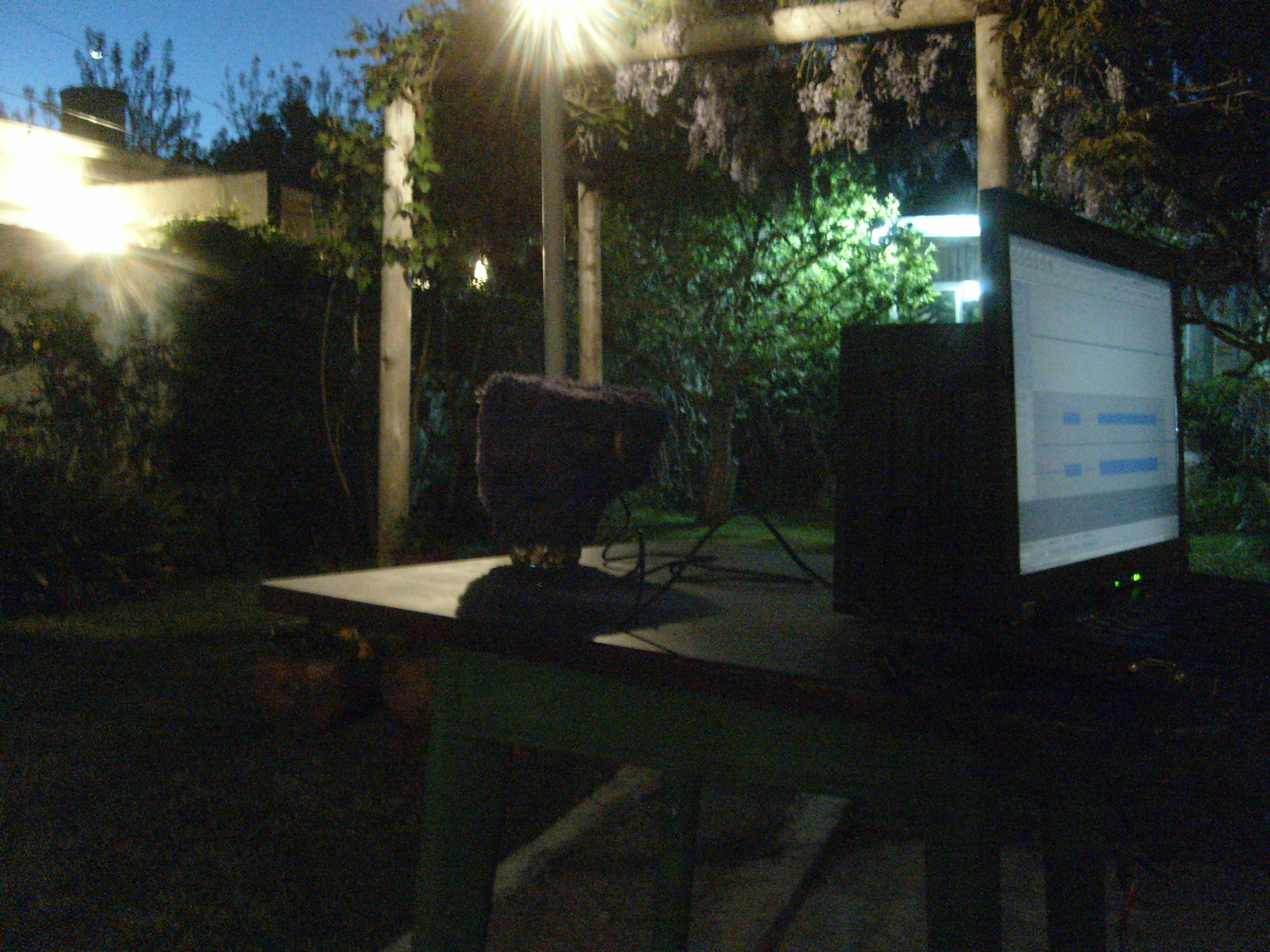
I don’t have proper facilities like an anechoic chamber. Testing was done using a 1KHz tone and recording the sound from the back, 45 and 90 degrees ccw (shouldn’t matter) and facing the front of the camera. While there’s an improvement over the original pattern, the directivity achieved is not enough so we’ll pursue an alternate way of capturing sound (either a multichannel soundcard or modifying the internal mics).
-

- Above: with foam. Below: natural response.